見積もりをもらう
D:PLOY TRANSFERRING

D:PLOY Transferring-ピックアンドプレース・アプリケーション用に自動化されたソリューション
プログラミングとシミュレーションを一切行わず、数時間以内に、いくつかの簡単な手順でロボットによる移動(ピックアンドプレースとも言います)アプリケーションを稼働させることができます。D:PLOYはピックアンドプレース・アプリケーションの構築、稼働、モニタリング、再展開といった手動の工程を自動化し、従来のソリューションと比較して半分以上の時間を節約できます。
なぜD:PLOY Transferringなのでしょうか?
ロボットによる移動アプリケーションは、迅速にも簡単にもなることはありませんでした。パーツのパラメーターとピックアンドプレース位置をシンプルに定義するD:PLOYは、最高のスループットを実現するアプリケーションを自動的に設定・最適化します。多くの軽量産業ロボットアームまたは協働ロボットアーム用、移動アプリケーションの稼働用に同一の直感的なインターフェースとモニタリング・ダッシュボードが使え、動的な生産要件に合わせて、迅速で簡単な変更が可能です。
最低50%の導入時間節約で、ROI(投資利益率)をより迅速に
迅速な再展開により、新しいラインを簡単に発展させ、管理する
ダウンタイムを短縮し、生産性を強化
従業員を単調な作業から解放
いくつかの簡単な手順だけでD:PLOY Transferringを導入する
-
ステップ1-セルの設定D:PLOYは、ほとんどのインストールされたハードウェアを自動的に検出します。これ以上、ツールとその他のセル部品を制御するためにロボットの設定、インターフェースのインストールやプログラムに多大な時間を費やす必要はありません。
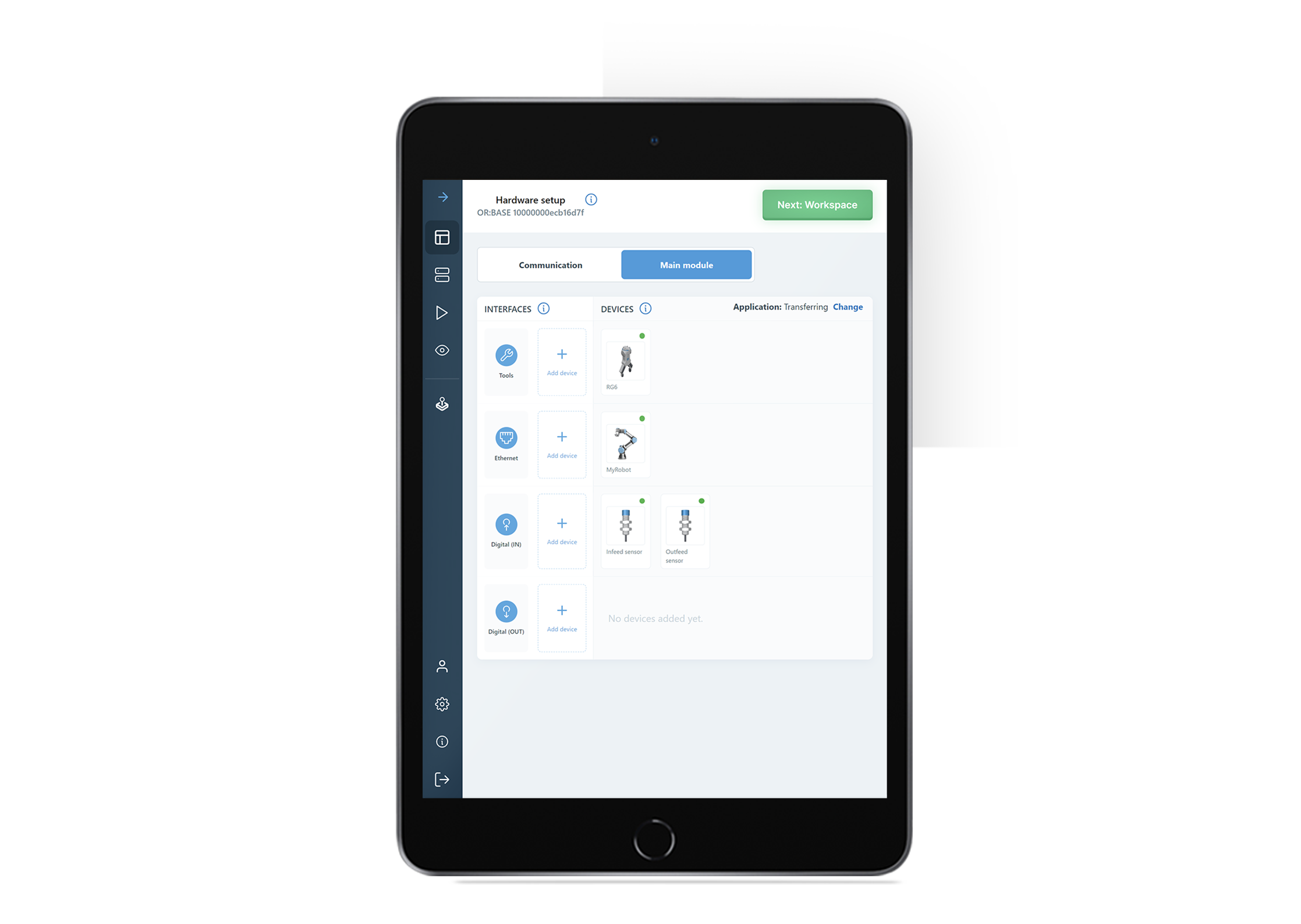 セルの設定
セルの設定 -
ステップ2-ワークプレイス直感的なグラフィカル・インターフェースを使用してワークプレイスの障害物とセルの境界を設定します。D:PLOYは定義された障害物に応じた、衝突のないパスを自動的に生成します。
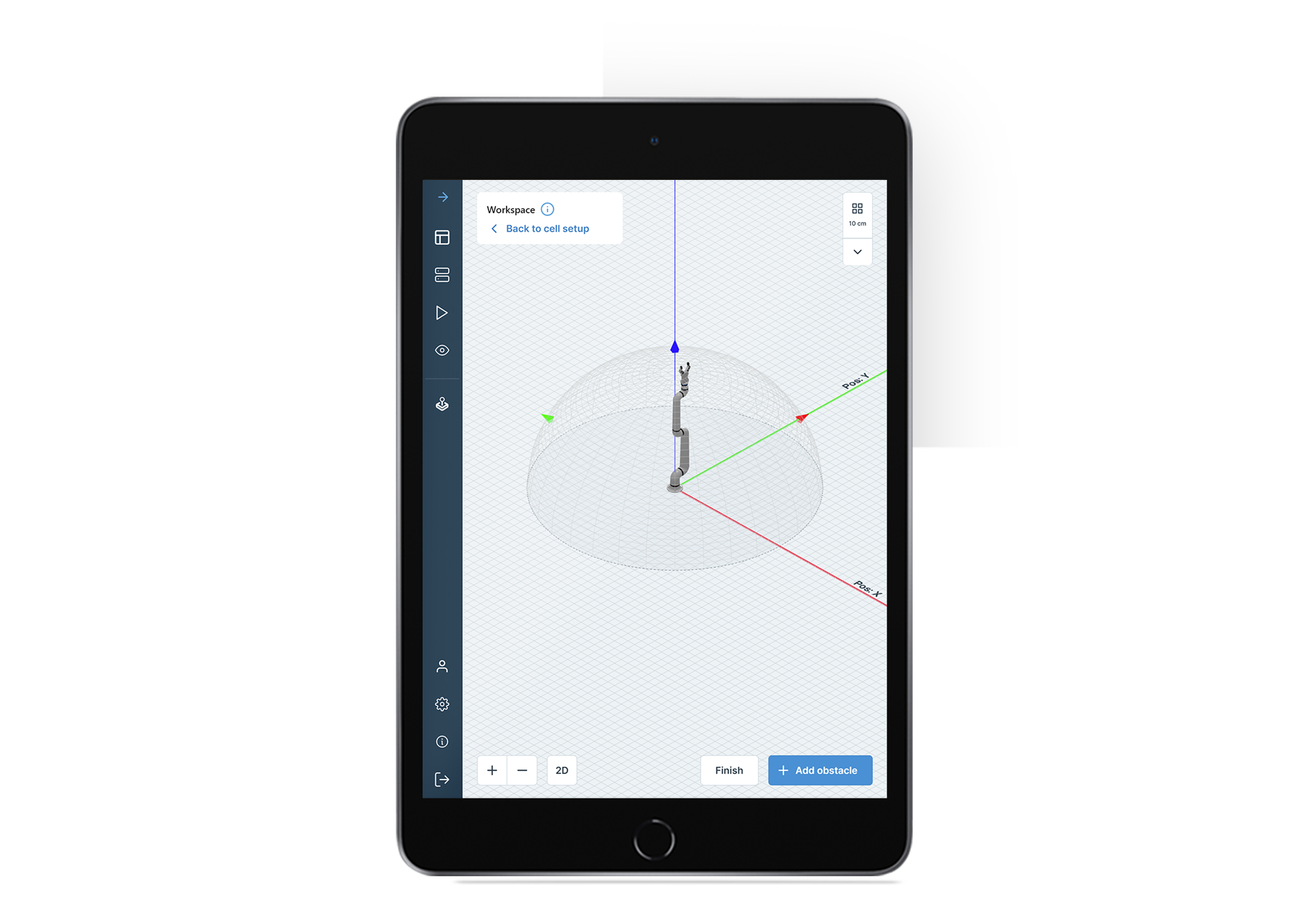 ワークプレイス
ワークプレイス -
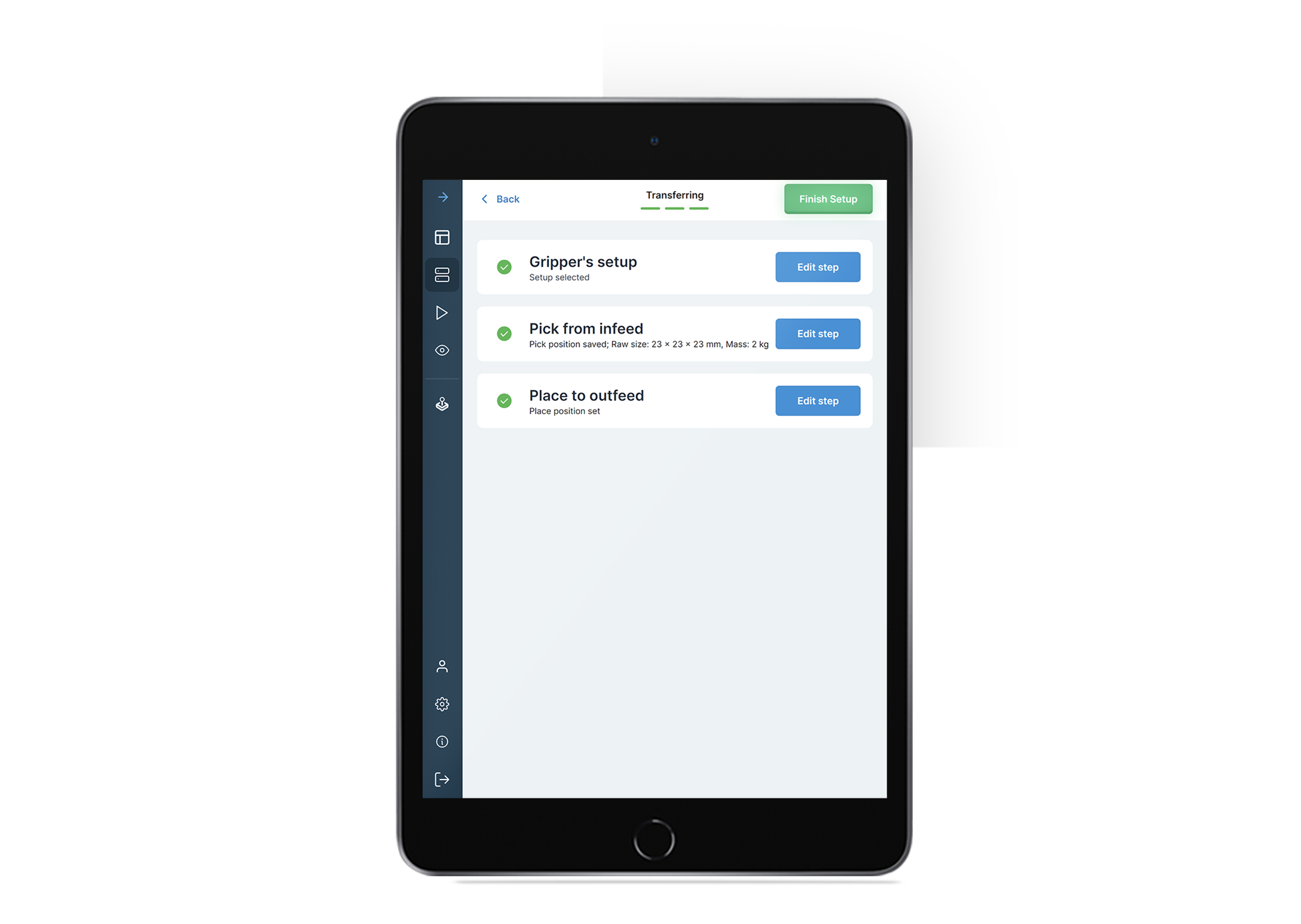
ステップ3-アプリケーションの設定簡単かつ段階的なフローで、ワークピースの特性やピック位置のようないくつかのアプリケーション情報を入力します。D:PLOYは、アプリケーション全体に対するプログラムロジック、信号変換、イベントハンドリングおよび経路計画のすべてを自動的に生成、最適化します。
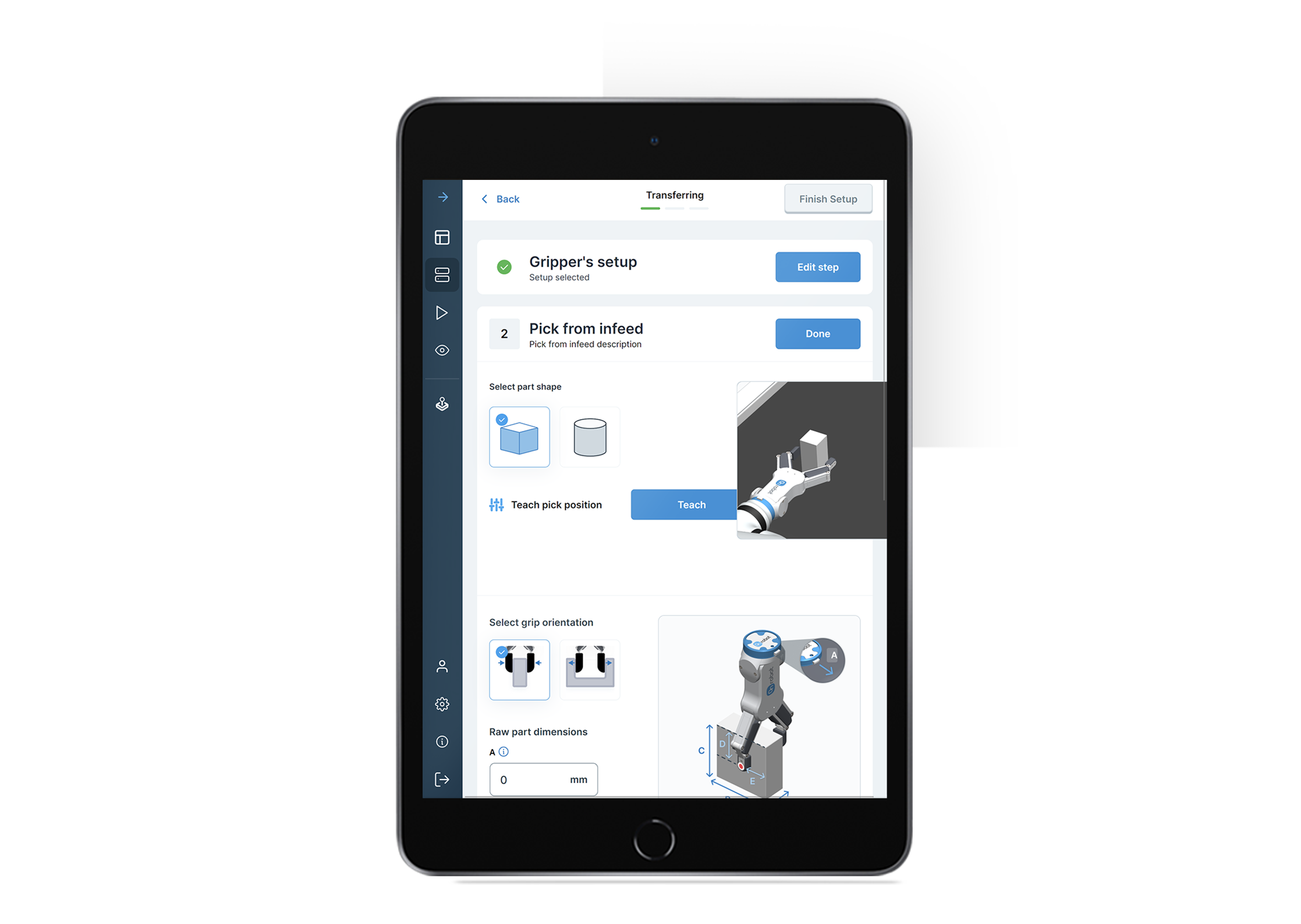 アプリケーションの設定
アプリケーションの設定 -
ステップ4-操作と監視ボタンをクリックするだけでアプリケーションを起動します。最低限の設定により、リアルタイムでパフォーマンス・インジケーターをモニタリングし、生産性を高めてダウンタイムを最小限にします。
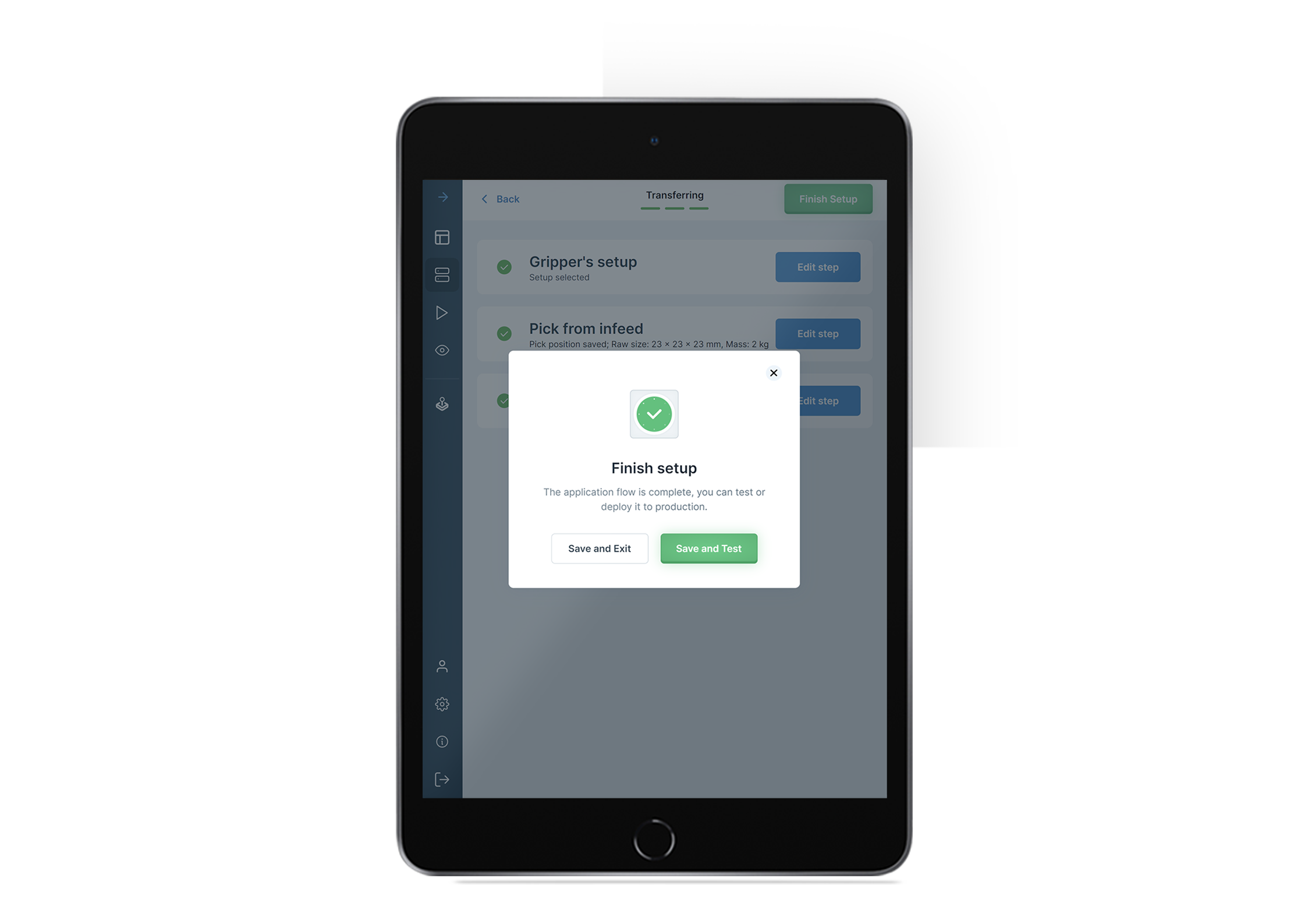 操作と監視
操作と監視 -
ステップ5-再展開新しいパーツの導入や、新しい移動ニーズに合わせるため、生産要件が変わった際に素早く変更し、アプリケーションを再展開します。
 再展開
再展開
いくつかの簡単な手順だけでD:PLOY Transferringを導入する
ワンシステム、複雑さゼロ、無限の機会
最低でも50%迅速な導入
迅速で簡単な展開
プログラミング不要
D:PLOYアプリケーションが複数でも、簡単な同一のインターフェース
D:PLOYプラットフォームは、ハードウェアとソフトウェアを結びつけ、さまざまなロボット・アプリケーションに対応するソリューションを提供します。現在D:PLOYは移動に加えて以下のアプリケーションに対応しており、今後も順次対応していく予定です。

D:PLOY CNCにより、ロボットCNCマシンテンディングの複雑さを排除する

D:PLOY Packagingにより、複雑なロボットプログラミングを行わずに迅速で簡単なパッケージングを実現

D:PLOY Palletizingで、パレタイジング・アプリケーションを迅速かつ簡単に設定し、適応させる
各種ロボットメーカーとの互換性



Awards Won in 2023



OnRobot Product Brochure
OnRobot products open new possibilities for automating tasks that you never thought possible. Check out our product brochure to see how you can save cost and increase productivity with flexible automation tools
